 关注官方微信
关注官方微信
1 简介
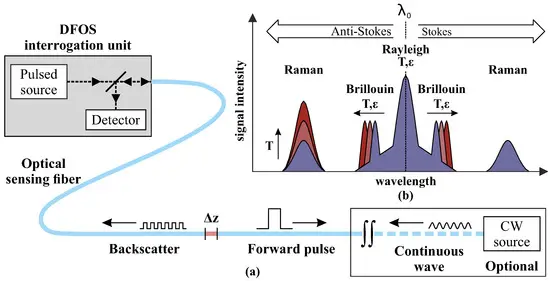
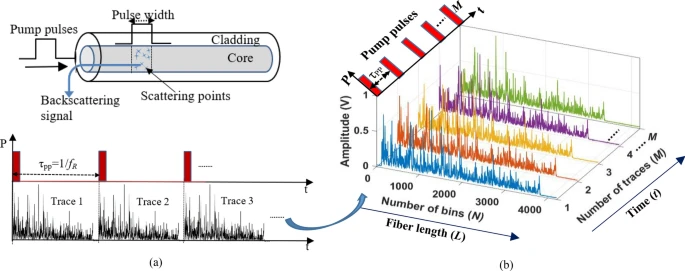
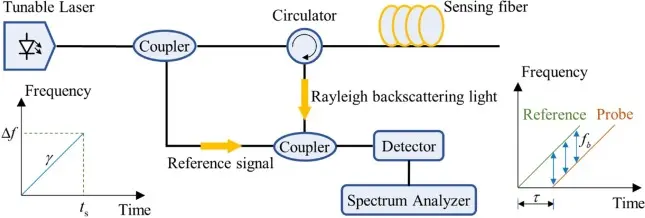
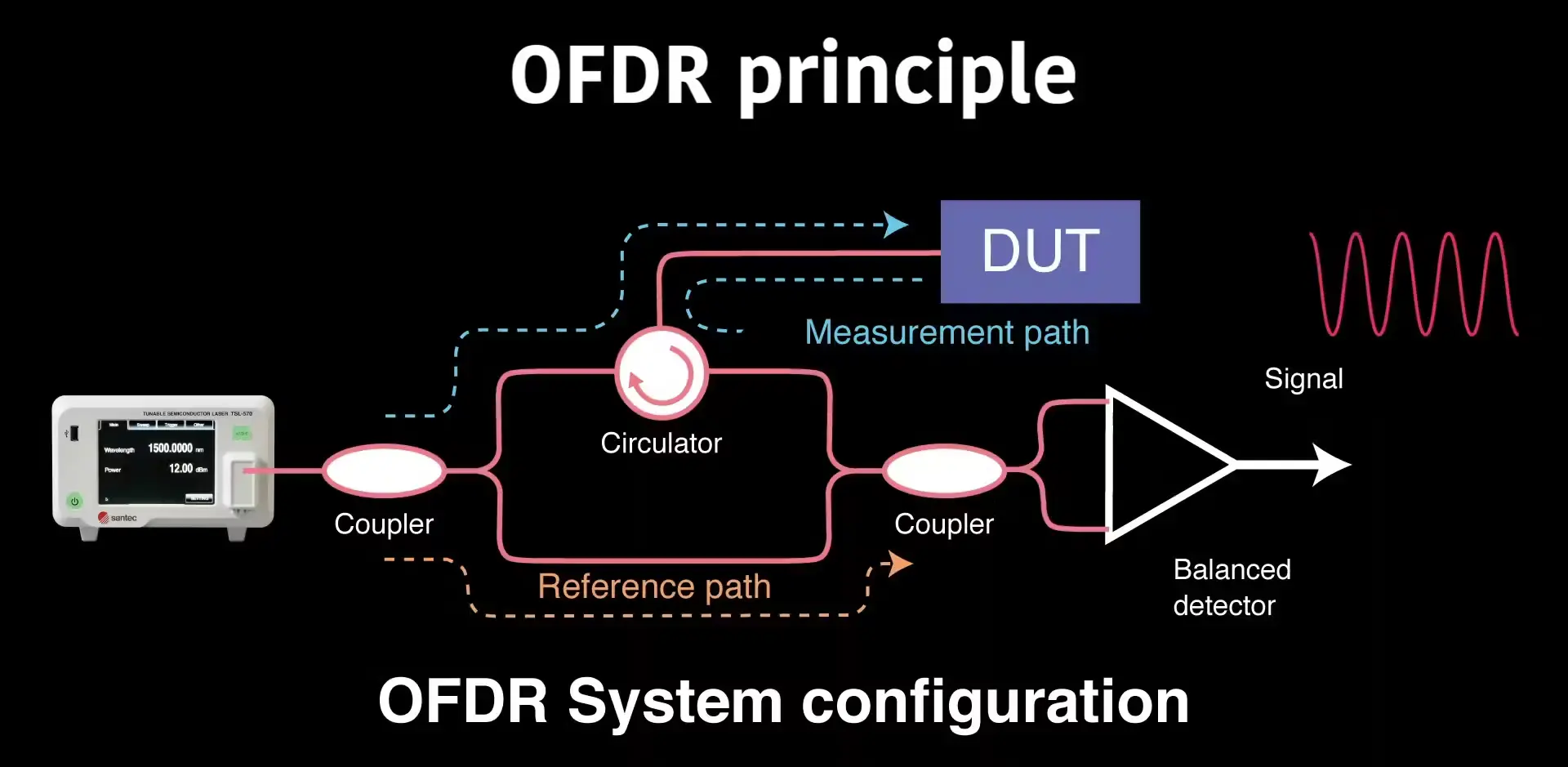
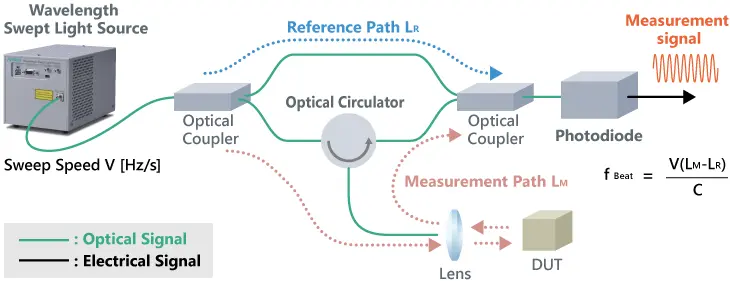
分布式声学传感 (DAS) 是一种光电系统,它使用瑞利背向散射光和光时域反射仪 (OTDR) 来测量光纤电缆沿线的动态应变事件。与基于传感器的传统测量不同,DAS 系统通过光纤电缆提供分布式测量,而无需专用传感传感器及相关的电源和遥测设备。将激光脉冲注入光纤电缆,并记录返回的背向散射信号随时间的变化。连续脉冲之间背向散射信号的变化用于测量光纤沿线的声学轴向应变。这些轴向应变是地面运动对传感光纤长度(称为标距长度)影响的平均值。光电系统通常称为询问器单元,可提供从 <0.001 Hz 至 50 kHz 的宽带频率测量,动态范围大于 100 dB。最大传感范围取决于多种因素,例如光纤沿线的光损耗、激光功率等。现代系统能够提供数十公里的有用数据。与典型的声学传感阵列(例如拖曳阵列)相比,这带来了更宽的空间孔径和更密集的采样。
部署在海底的DAS系统可以记录多种信号类型,例如地震、潮汐效应、Scholte波、重力波、海洋哺乳动物以及海上交通产生的水下辐射噪声。传统的被动声学监测(PAM)系统也可以获得类似的测量结果,该系统使用固定水听器,例如系留浮标或海底记录仪、滑翔机或拖曳阵列。然而,与DAS相比,此类系统的空间孔径通常较小,而DAS可以在数十公里的更大距离上实时提供密集的空间测量。
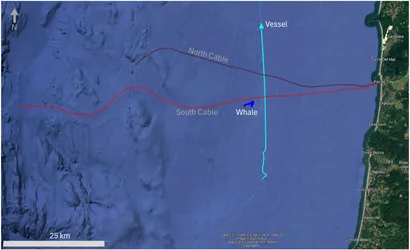
2021年11月1日至5日,在区域电缆阵列 (RCA) 监测网络的定期维护期间,记录了分布式温度传感 (DAS) 和分布式温度传感 (DTS) 测量数据。海洋观测站倡议 (OOI) RCA 有两条电缆从美国俄勒冈州太平洋城延伸而出:北电缆延伸至轴向海山,南电缆则绕回到太平洋城南部的大陆边缘。两条电缆均包含一对双绞光纤,为海底观测站提供 10 Gbps 以太网连接。南电缆的 DAS 数据采集长度约为 95 公里,北电缆的 DAS 数据采集长度约为 65 公里( 图 1 )。
Wilcock 等人(2023) 对 RAPID OOI 数据集进行了初步分析, 发现了多种信号,包括蓝鲸和长须鲸的叫声、船只噪音和海面重力波。随后,研究人员利用该数据开展了微地震活动性研究、海洋沉积物表征研究、海洋监测研究和声传播研究( Abadi 等人,2022 ; Ragland 等人,2023 ; Douglass 等人,2023 ; Goestchel 等人,2024 ; Fang 等人,2022 ; Shi 等人,2025 )。在北极地区也观察到了类似的观测结果( Bouffaut 等人,2022 )。
本研究描述了一种基于传统地震分析技术的处理方案,使我们能够识别出与大型集装箱船通行时间相吻合的长达 2 小时的长须鲸叫声序列。
2 材料和方法
分析数据来自南海电缆,采用 Silixa iDASv3 询问器采集,标距 30 米,通道采样间隔 2 米,采样频率 200 Hz。光纤被询问至距离海岸 95 公里的第一个光中继器,水深可达 1600 米。在此范围内,电缆埋设深度标称在海底以下 1.5 米。询问器单元、计算设备和数据存储器位于靠近电缆海滩登陆点的设施内。
Wilcock 等人 (2023) 对这些数据进行了早期研究, 发现地震、船只和海洋哺乳动物等许多声源可用于表征潜艇 DAS 系统的信号和噪声状态。在四天的记录中,通常从远场高频 T 相(水上到达)中发现地震,这些 T 相实际上是平面的。俄勒冈海岸附近区域是繁忙的商业航运区,船只种类繁多,从小型渔船(通常 20 米)到大型集装箱船和散货船(200 米)。对美国国家海洋和大气管理局 (NOAA) 提供的公共自动识别系统 (AIS) 数据的分析表明,在 DAS 记录的四天内,有 30 艘船只经过两条电缆的感应范围。然而,由于较大的船只水下辐射噪声 (URN) 特征幅度较大,因此只能检测到其中少数。船只的声学信号及其AIS导航数据被用于校准光纤沿线DAS通道的位置。在整个调查过程中,清晰地观察到了鲸鱼的声学信号,并被识别出来自蓝鲸,以及更常见的长须鲸( Wilcock等人,2023 )。
长须鲸是声音最大的海洋动物之一,据报道,它们的声压级 (SPL) 在 1 米处为 189 dB re 1 μPa( Weirathmueller 等人,2012 年 )。相比之下,在水平方向上测量的气枪阵列的 SPL 约为 223–229 dB re 1 μPa( Landrø 和 Amundsen,2010 年 )。典型的长须鲸叫声持续约 1 秒,每 15 秒重复一次,向下频率扫描约为 20Hz。在对 OOI RAPIDS 数据的初步分析( Wilcock 等人,2023 年 )中,据报道,长须鲸会发出两种以幅度和频率为特征的叫声类型。
在接下来的部分中,我们将描述如何筛选4天的DAS数据,以识别包含长须鲸鸣叫声的数据集。然后,我们使用相关技术对鸣叫声进行高质量的估计,并随后用于估算直接到达时间。这些到达时间随后被用于确定鲸鱼的位置。
2.1 信号调理
现场数据主要由缓慢移动、低频(< 1 Hz)的表面重力波组成。这些信号可以使用高通滤波器(例如 5 Hz)有效地去除。但是,由于来自长须鲸的目标信号频带限制在 10 到 40Hz 之间的频率范围内( Wiggins 和 Hildebrand,2020 ),我们应用了 5 阶 巴特沃斯带通滤波器,并额外下采样至 100 Hz(奈奎斯特频率为 50Hz)。与 DAS 数据相关的典型噪声类型是所谓的共模噪声 (CMN),它是由近询问器振动引起的。CMN 的特点是所有通道上都发生瞬时噪声,转化为零波数和宽带频率噪声。通过估计所有通道的加权堆叠噪声并从受污染数据中减去噪声估计值,可以有效地消除这种噪声。最后,使用维纳滤波器衰减随机噪声。在此阶段,我们对数据进行了调整,以便长须鲸的叫声在数据中清晰可见(见图 2 )。
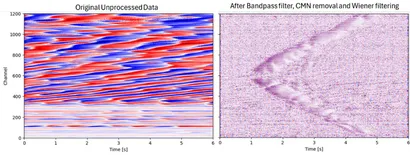
图 2. 数据调节示例,显示 07:16:25 UTC 的 6 秒数据。左图显示原始数据以低频、低速表面重力波为主,略微可见高频长须鲸鸣叫声;右图显示相同数据经过带通频率滤波、CMN 去除和维纳滤波后的结果。应用了迹线归一化。
DAS 系统从四天的记录中生成了大量数据。南电缆上的询问器单元以 200Hz 的时间频率对电缆上每隔 2 米间隔的 40,000 多个通道进行数据采样。这样的采样率每天会产生大约 2.7 Tb 的数据。我们使用分块方法(也称为均值池)来有效地从这些大数据量中检测出单个鲸鱼叫声。分块过程使用大小为 5 个通道和 5 个时间样本的块来求和绝对应变值。这个块大小保留了 1 秒长的鲸鱼叫声,同时将数据量减少了 25 倍(见图 3 )。这种分块加上从 200Hz 到 100Hz 的时间下采样,将原始数据量减少了 50 倍。
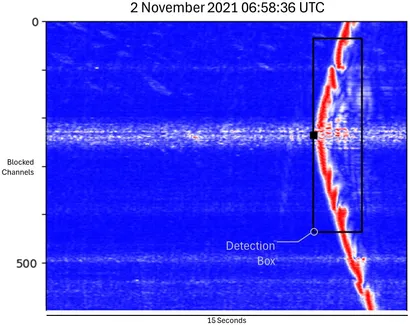
图 3. UTC 时间 06:58:36 检测到的屏蔽数据通话。检测到的事件的顶点用黑色小方块表示,标有“检测框”的黑色轮廓表示模板大小。
我们使用模板匹配来检测鲸鱼叫声。模板使用振幅和传播时间模型对距离线性 DAS 光纤最远 1 公里范围内的事件(假设水深 300 米,水中声速 1480 米/秒)进行建模,从而对鲸鱼叫声特征和 DAS 数据特征进行建模。建模内容包括几何扩展和余弦平方振幅 DAS 响应( Mateeva 等人,2014 年 )。生成的模板对应于 4 公里空间孔径和 2 秒时间孔径的窗口。这相当于阻塞数据中 400 个通道乘以 40 个时间样本的大小。基于此模板,我们还设计了另外两个模板——称为“内部”和“外部”模板——用于对检测到的事件进行质量控制 (QC) 以消除误报。在发生潜在检测后,应用两个 QC 模板来测量模板内部和外部数据的幅度,然后计算信噪比 (S/N) 指标来确定调用的时间和类型(参见 图 4 )。
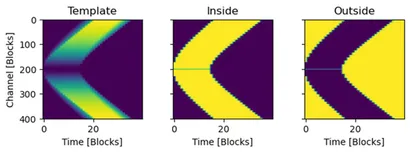
图 4. 检测模板(左)以及附加的内部(中)和外部(右)QC 模板。蓝色代表 0,黄色代表 1。
模板与阻塞数据进行互相关,以识别高相关区域。然后使用 QC 模板评估超过通过测试确定的互相关阈值的区域,以获得用于标记有效检测的信噪比指标。当 SNR 超过 2 时,会标记检测。模板匹配应用于 2021 年 11 月 2 日 06:15 至 08:15 UTC(2021 年 1 月 11 日 23:15 至 2021 年 2 月 11 日 01:15 PDT)记录的南电缆数据,结果超过 300 次检测。 图 5 显示了显示 S/N 和峰值幅度检测指标的时间线图。这些表明指标通常遵循两个级别。后续调查表明,这两个级别对应两种不同的呼叫类型,主要以高振幅和低振幅为特征。这种呼叫是长须鲸的特征,被称为双峰歌曲。我们还观察到,鸣叫声大约每12分钟出现一次停顿,每次持续约1分钟( 如图5 中灰色方框所示 )。这些鸣叫声的停顿被解读为长须鲸浮出水面呼吸。
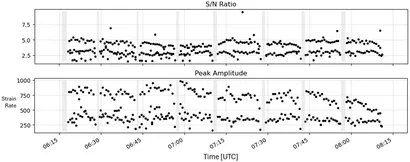
图 5 . 上图显示 QC 指标(信噪比),下图显示通过模板匹配检测到的事件的峰值幅度。灰色框表示调用停止的时间间隔。
2.2 本地化
为了定位鲸鱼,我们获取检测到的事件,并对通道波形和作为导频迹线的声学呼叫波形估计值进行互相关分析。为了开始此过程,我们选择了具有高 SNR 的检测(两种呼叫类型分别为 >3.5 和 >5),并使用单通道获取两种呼叫类型的初始估计值。然后,互相关分析可以对齐和叠加首波,以获得对导频的改进估计。在叠加过程中,使用一种稳健方法,其中超过阈值相关系数的数据会对叠加有所贡献。这种互相关和选择性叠加可以得到对导频迹线的改进估计。然后重复此过程多次,以获得逐渐更好的估计值。我们使用相位加权叠加 (PWS; Schimmel 和 Paulssen,1997 ) 来获得对导频迹线的高质量估计(见图 6 )。

图 6. (左)所有通道对准后的直达波,计算出的相关系数显示在右侧的边缘图中,(右)相关系数超过阈值的通道、平均值(线性)和相位加权叠加(PWS)显示在图下方。
现在使用希尔伯特变换的分析轨迹来表征由互相关和叠加得到的呼叫估计值,以获得瞬时频率和振幅(见图 7 )。我们发现,较高振幅呼叫(类型1)的频率在0.65秒内从27 Hz降至19 Hz。较低振幅呼叫(类型2)对应于向下扫描信号,频率在0.75秒内从20 Hz降至17 Hz。 图8 显示了通过互相关对呼叫类型进行分类的时间线, 其中清楚地标识了与表面相对应的12分钟间隔。
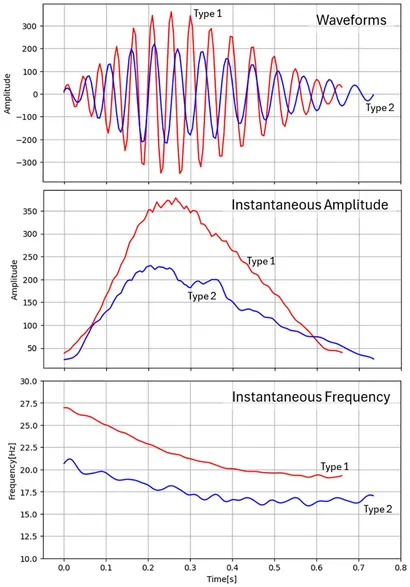
图 7. 数据中观察到的两种呼叫类型的导频波形,分别以红线和蓝线表示。顶部图显示时间域,中间图显示幅度包络,底部图显示瞬时频率与时间的关系。

图 8 . 时间轴显示了通过相关性分析确定的鸣叫类型分类。上方蓝点表示被识别为“类型 1”的鸣叫。下方黑点表示被识别为“类型 2”的鸣叫。鸣叫序列大约每 12 分钟出现一次中断(灰色箭头所示),这被解读为鲸鱼浮出水面呼吸。
利用互相关得到的时移来估计长须鲸的位置。为了进行定位,我们假设鲸鱼位于海平面以下 10 米处( Kuna 和 Nábělek, 2021 ),这是长须鲸的典型深度,水中的声音为 1480 米/秒。我们采用了一种稳健的定位程序,使用修剪的 L1 指标最小化模型行进时间与观测到的行进时间之间的差异。该指标在潜在位置网格上进行评估,然后使用下坡梯度法 (BFGS) 细化网格最小值。然后重复此网格搜索和细化过程 3 次,每次迭代都使用以前一个最小值为中心的较小网格范围。
图9 显示了一个检测到的事件的目标函数示例 。我们可以看到,目标函数是双峰的,两个互补的解对称地位于电缆的南北两侧。这两个解是可以预料到的,因为单轴传感线性阵列无法区分这两个解(有时称为左右模糊问题)。最南端的解是根据对北电缆DAS数据的初步分析而选定的。
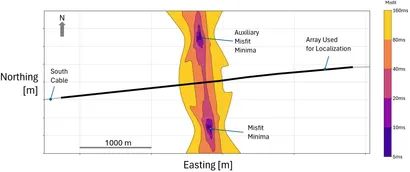
图 9. 用于定位呼叫的目标函数度量示例,显示电缆(灰线)和使用行程时间进行定位的电缆部分(粗黑线)。
3 结果与讨论
对所有检测到的鸣叫声重复定位程序。我们发现,这头鲸鱼最初沿着一条几乎与南侧电缆平行的东北偏东方向的直线轨迹游动了大约 2 公里,持续了 30 分钟。这相当于它的平均速度为 4 公里/小时,而据报道,长须鲸的巡航速度为 10-15 公里/小时,进食时的最高速度为 40 公里/小时。在世界标准时间 07:50 左右,鸣叫声沿着一条复杂的轨迹游动了大约一个小时,然后轨迹移到西南偏南方向。最近的鸣叫声距离电缆 750 米。最远的鸣叫声距离电缆 2 公里。 图 10 显示了鸣叫声相对于电缆的位置。
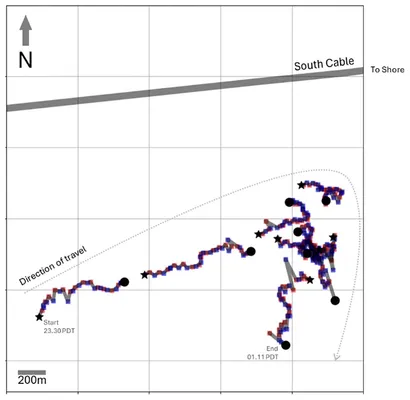
图 10 . 显示已定位呼叫的地图。高振幅和低振幅呼叫分别显示为红色和蓝色方块。每个序列的起点用星号表示,终点用大黑色圆圈表示。
当我们检查检测到的叫声时,我们发现 07:30 UTC 左右的一些叫声显示的信号被解读为船只噪音, 如图 11 所示。我们通过检查 NOAA( 美国国家海洋和大气管理局 )公开提供的在该区域和时间范围内作业的船只的 AIS 数据识别了这艘船只。声音信号对应的是一艘长 261 米、宽 32 米、总吨位 40542 吨的大型集装箱船。识别船只后,我们提取了鲸鱼叫声所在时间窗口的导航数据和时间戳。在 06:18 UTC 叫声序列开始时,船只位于南电缆以南约 15 公里处,以约 1.5 公里/小时的速度向西北偏北方向缓慢移动。协调世界时 (UTC) 06:50,该船开始直接向北行驶,并在 15 分钟内加速至 20 公里/小时,随后加速度逐渐减小,直至协调世界时 (UTC) 07:40 达到 24 公里/小时。协调世界时 (UTC) 07:35,该船直接驶过南电缆上方,水深 370 米(见图 12 )。
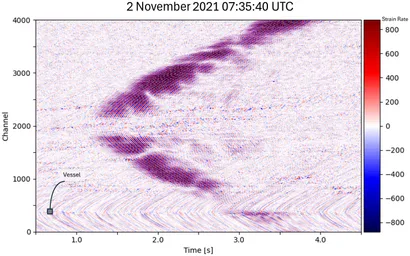
图 11 。声学应变数据显示,UTC 时间 07:35:40,在 400 频道附近听到了长须鲸的叫声和船只噪音(标记为“船只”)。
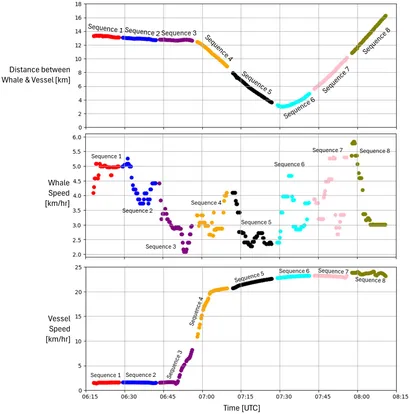
图 12. 时间轴显示(上方)鲸鱼与船只之间的距离、(中间)鲸鱼的速度以及(下方)船只的速度。数据根据鲸鱼的叫声顺序着色。
对该船进行频率-波数 (FK) 分析,发现了几个可能由发动机机械引起的音调。仔细分析后,我们可以看到,这些“音调”实际上是由于多普勒效应而分裂的(见图 13 )。与模拟的多普勒频移进行比较,结果与根据 AIS 信息计算出的船速高度吻合( Rivet 等人,2021 年 )。FK 分析还显示了低频-低波数区域内与表面重力波和 Scholte 波相关的频散信号(见图 14 )。
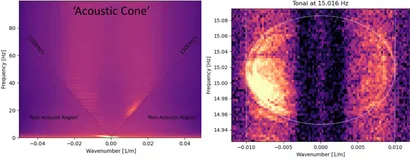
图 13. 船舶驶过电缆时的平均 FK 分析。右侧图表放大了船舶产生的 15Hz 音调,显示了多普勒频移,模拟的多普勒频移以白色椭圆表示。
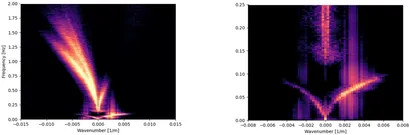
图 14. 低频低波数区域的平均 FK 分析,显示(左)Scholte 波和(右)表面重力波。
我们认为鲸鱼对船只存在行为反应。在世界标准时间 06:50(序列 3)期间,当船只开始加速并向北移动时,鲸鱼的速度减慢至最低 2 公里/秒,并向西北方向游动,远离位于东南偏南 13 公里处的船只。在此之前,在序列 1 和序列 2 中,鲸鱼正向东游向海岸线。在序列 4 至序列 7 中,鲸鱼的叫声似乎遵循着一条复杂的轨迹,并且总体上移动得更慢,而鲸鱼与船只之间的距离从 10 公里缩短到 3 公里的最近距离。在最后一个序列(序列 8)中,鲸鱼开始沿着更线性的方向向南游动,远离向北行驶的船只。这些相互作用总结在 图 12 和 图 15 中。虽然我们认为鲸鱼的行为反应是对船只的反应,但它也可能与进食或其他行为有关。要确定典型的行为反应,需要获取更长时间范围内的数据集。尽管如此,此前已有报道称,比斯开湾的鲸鱼表现出此类回避行为,这与比斯开湾的快速渡轮( Aniceto 等人,2016 年 )、地震气枪( Caruso 等人,2016 年 )和军事演习( Thomas 和 Martin,2021 年 )有关。此外,还可能识别出发声特征的细微变化,这也可能预示着回避行为(例如 Caruso 等人,2016 年 )。
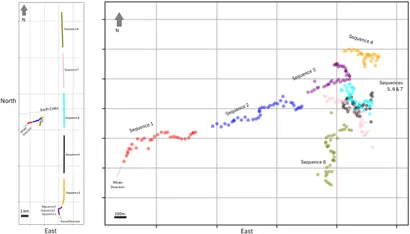
图 15. 地图(左)显示了已定位的鲸鱼鸣叫声与船只航迹的关系,其中航迹以颜色编码,以对应鸣叫声的顺序。右图是鲸鱼鸣叫声位置的特写视图。
4 结论
我们展示了如何分析现有电信光纤上采集的DAS数据,以研究位于海底电缆2公里范围内的长须鲸的响应。通过应用常规地震处理技术(例如模板匹配、行程时间定位)和信号处理技术(例如相关性、叠加、瞬时属性等),我们可以在2小时内追踪一头长须鲸,并从声学角度描述其鸣叫声。我们发现,这些鸣叫声构成一种双连音,主要以振幅和频率为特征。在2小时内,我们观察到鸣叫序列中大约每12分钟出现一次明显的中断。这些中断被解读为长须鲸浮出水面呼吸的时间。我们发现,这头鲸最初向东游动,但随后突然改变行为,变得更加混乱,然后继续向南游动。我们进一步调查后发现,其行为异常的时间段与一艘北行大型集装箱船的通过时间相吻合。虽然此前也观察到过此类行为,但定位方法的非唯一性限制了这一结论。如果电缆偏离线阵列(即电缆弯曲),则可以解决这些位置模糊问题。尽管如此,这项研究表明,DAS 可用于了解海洋野生生物和商业活动的行为反应。此外,由于数据量和处理负载与地热、碳封存等实时地震监测应用所使用的数据量和处理负载相似(例如 Mondanos 等人,2024 年 ),因此可以实现防止船舶撞击的实时监测解决方案。DAS 可以为现有的被动声学监测 (PAM) 系统(例如浮标、滑翔机、拖曳阵列)做出贡献,并且具有提供可改装到现有海上电信光纤的远程监测解决方案的优势。

{kind=link}