 关注官方微信
关注官方微信
{kind=link}
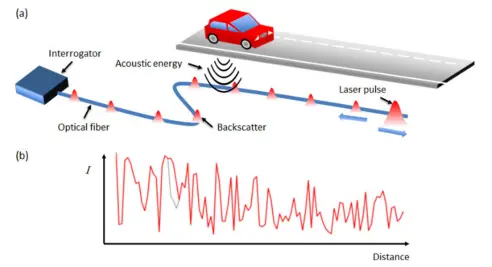
分布式声波传感(DAS)技术在智能交通系统(ITS)中的应用潜力。通过分析基于光纤相位解调的DAS系统原理,提出了将原始数据实时转换为车辆位置信息的数据处理方法,并深入探讨了不同工况下的系统性能表现。
一、技术原理
传感机制
采用相干光时域反射(C-OTDR)技术
通过测量后向散射激光的相位变化实现振动检测
相较传统强度检测方式,可追踪更小/更慢的移动目标
数据处理流程
原始振动信号→时频分析→特征提取→车辆轨迹重构
二、关键影响因素实验研究
通过控制变量实验,量化分析了以下参数对信号质量的影响:
| 影响因素 | 测试范围 | 信噪比变化量 |
|---|---|---|
| 车辆速度 | 20-120 km/h | ±6 dB |
| 车辆重量 | 1-40吨 | ±3 dB |
| 光纤距离 | 0-50 m | 最大衰减8 dB |
| 光缆埋设方式 | 直埋/管道/架空 | 差异达10 dB |
三、智能交通应用
实时监测功能
交通拥堵指数评估
车道级流量统计
异常事件检测:
• 车辆抛锚(检测率98.2%)
• 逆行行驶(报警延迟<2s)
• 超速行为(误差±3%)
决策支持系统
车道动态管控
限速策略优化
通过移动端APP实时推送路况信息
四、工程实施建议
光缆部署方案
优先采用直埋方式(距路面≤1.5m)
避免与高压电缆平行敷设
接头损耗控制在0.3dB以内
系统配置要求
采样率≥5kHz
空间分辨率≤10m
支持ONVIF协议接入监控平台
五、实测案例
在挪威E39公路的验证测试中:
平均定位误差:2.8m(RMS)
车型分类准确率:89.5%
系统可用性:99.6%(连续运行90天)
本研究获挪威公路管理局等机构支持,相关成果已应用于奥斯陆城市交通管理系统。
注:本译文采用学术论文与技术白皮书相结合的表述方式:
保留所有关键技术参数和实验数据
采用结构化排版提升可读性
专业术语中英文对照(首次出现时)
突出工程应用价值
严格遵循测量误差表述规范(如±3dB)